
















旋翼知识篇


走进无人机——(旋翼)无人机知识
H5,H5页面制作工具
- 海

- ——(旋翼)无人机知识
- 走进无人机
- 1.组成部分
2.各部分功能及名称 - 旋翼无人机知识
- (4)载荷部分
- (3)控制部分
- (2)动力部分
- (1)机身部分
- 1.组成部分

- 等
- (1.3)脚架
- (1.2)中心板
- (1.1)机臂
- (1).机身部分

- (1.4)螺旋桨
- (1.3)电调
- (1.2)电机
- (1.1)电池
- (2).动力部分
- (1.5)遥控器
- 等
- (1.9)磁罗盘
- (1.8)陀螺仪
- (1.7)气压计
- (1.6)LED工作灯
- (1.4)接收机
- (1.3)WIFI
- (1.2)GPS
- (1.1)飞控
- (3).控制部分



- 等

- (1.3)电力挂钩
- (1.2)航拍云台装置
- (1.1)农药喷洒装置
- (4).载荷部分
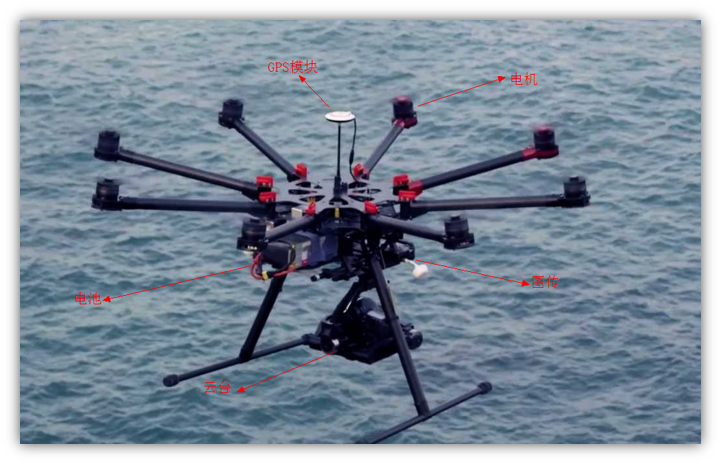
- 多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需要,一般还需要配备电池、遥控器及飞行辅助控制系统.
- 1.有人机简史
- (4)载荷部分
- (3)控制部分
- (2)动力部分
- (1)机身部分
- 2.各部分功能及名称
- 机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。一般使用高强度重量轻的料,例如碳纤维、PA66+30GF等材料。
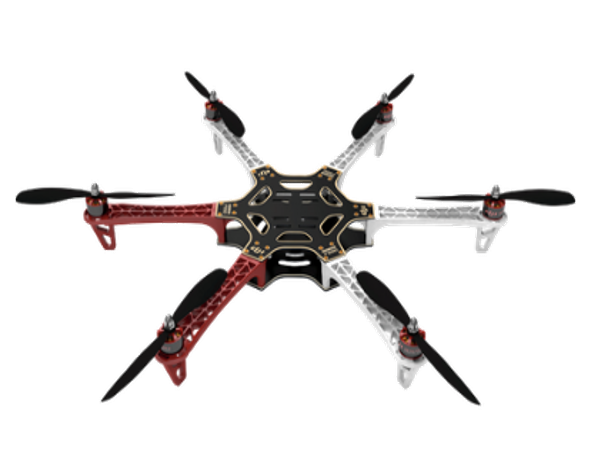
- 2.1.机身部分


- (1)电池
- 电池是将化学能转化成电能的装置。
在整个飞行系统中,电池作为能源储备,为整个动力系统和其他电子设备提供电力来源。目前在多旋翼飞行器上,一般采用普通锂电池或者智能锂电池等。
- 2.2.动力部分

- (1)电池
- 电池的容量: 2200-22000mAh
电池的电压: 满电4.2v 100%
放电截止电压3.75v 20%
过放电电压3.68 10%
保存电压3.85 50%
电池的电量:单位(Wh)
换算公式:Wh(功率w)= V(电压v)x mAh/1000(电流a )
电池的充放电流: 电池容量*充放电C数=充放电电流
串联电压加倍容量不变,并联容量加倍电压不变
- 2.2.动力部分

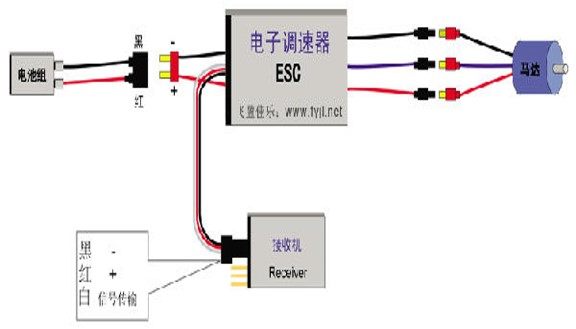
- (2)电调
- 全称:电子调速器
电调输入是直流,可以接稳压电源,或者锂电池。一般的供电都在2-6节锂电池左右。输出是三相交流,直接与电机的三相输入端相连。如果上电后你的电机反转,你只需要把这三根线中间的任意两根对换位置即可。电调还有三根信号线连出,用来与飞控连接,控制电机的运转。 - 2.2.动力部分

- (2)电调
- 直流变交流;改变电机转速;改变电压;给电机供电;稳压;降压;向飞控反馈电机参数;反向供电
- 2.2.动力部分
- (2)电调
- 电调共有八根线
黑红硅胶线连接:动力电源
三根较细的硅胶线连接:电机
三根信号线连接:飞控 - 2.2.动力部分

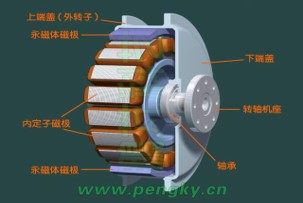
- (2)电机
- 电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品。在整个飞行系统中,起到提供动力的作用。
- 2.2.动力部分
- (3)电机
- 什么是KV值 ?
无刷电机KV值定义为 转速/V,
意思为输入电压增加1伏电压,
无刷电机空转转速增加的转速值。 绕线匝数多的,KV值低,最高输出电流小,但扭力大 绕线匝数少的,KV值高,最高输出电流大,但扭力小 - 2.2.动力部分
- (3)电机
- 规格尺寸;线圈扎数T ;重量;最大功率;
工作转速范围;空载KV值等
- 2.2.动力部分

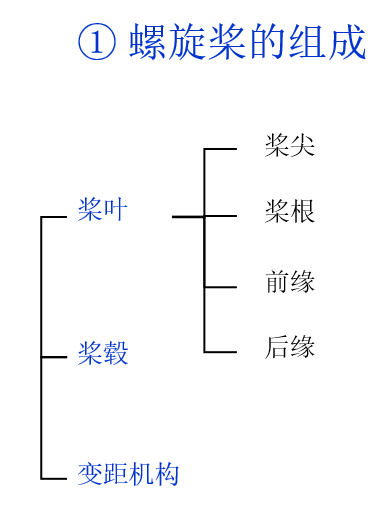
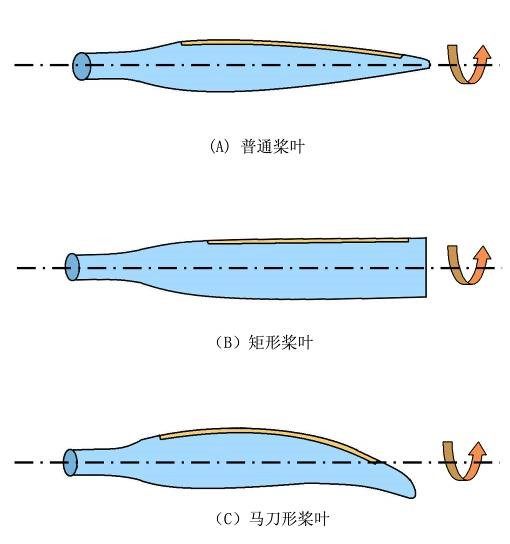
- (4)螺旋桨{桨叶}
- 桨叶是通过自身旋转,将电机转动功率转化为动力的装置。在整个飞行系统中,桨叶主要起到提供飞行所需的动能。按材质一般可分为尼龙桨,碳纤维桨和木桨等。
- 2.2.动力部分

- (4)螺旋桨{桨叶}
- 2.2.动力部分
- (4)螺旋桨{桨叶}
- 2.2.动力部分
- (4)螺旋桨{桨叶}
- 桨叶是通过自身旋转,将电机转动功率转化为动力的装置。在整个飞行系统中,桨叶主要起到提供飞行所需的动能。按材质一般可分为尼龙桨,碳纤维桨和木桨等。
- 2.2.动力部分

- (4)螺旋桨{桨叶}
- 2.2.动力部分

- (4)螺旋桨{桨叶}
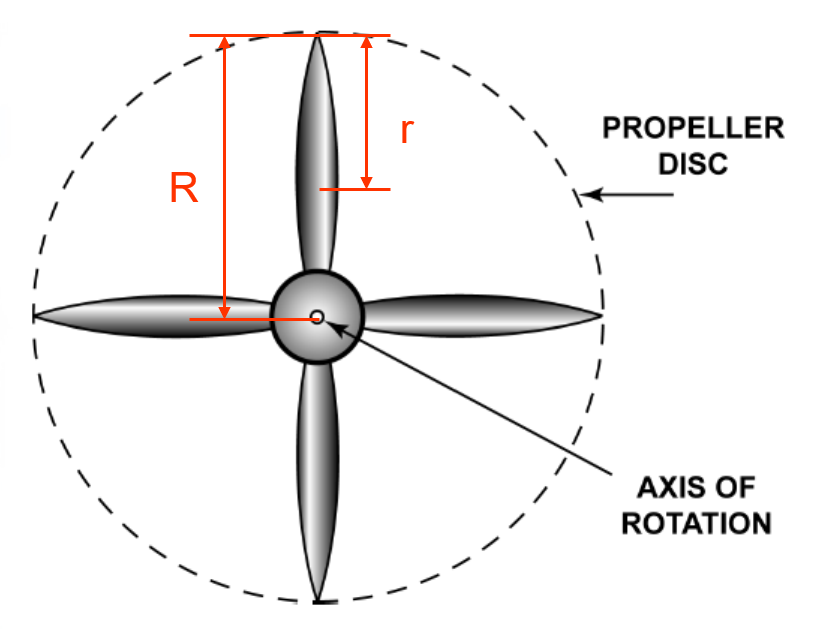
- 认识桨叶旋转方向
迎面的朝向为旋转方向,逆时针转为正桨CCW,顺时针转为反桨CW
了解螺旋桨的规格
以1855桨叶为例:直径18英寸 螺距5.5英寸 18*25.4=457.2mm
1英寸=25.4mm - 2.2.动力部分
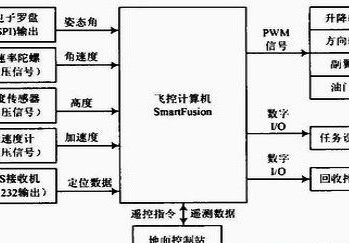
- (一)飞控

- GPS(位置 高度 速度)三轴陀螺仪包含[姿态传感器(是感知飞机倾斜程度的)角速度计(测量飞机角速度的)],三轴加速度计(测量飞机各轴加速度的)气压高度计(测量飞机高度的)温度传感器(感知飞控温度的)
- 2.3.控制部分
- (一)飞控

- IMU(加速度计,角速度计)气压高度计,GPS,磁罗盘 温度计
- 2.3.控制部分
- (一)飞控——IMU

- 1.测量飞机的角速度
2.测量飞机的加速度
3.感知飞机的方位变化和速度变化
4.解算飞机在三维空间中的姿态
5.调整并恢复飞机的姿态 - 2.3.控制部分

- 飞控的三大算法:
捷联惯性导航行,PID,卡尔曼滤波 - (一)飞控
- 2.3.控制部分
- (二)遥控系统

- 舵面遥控飞控什么都不管
姿态遥控飞控管姿态,人管位置
人工修正飞控姿态位置都管,人给位置修正量 - 2.3.控制部分

- 主要包括:农业喷洒装置,航拍云台装置,电力脱钩装置等
- 2.4.载荷部分
- FireFly编制/监制
- 启智
薛海超 
- 谢谢欣赏!
